フォーカシング技術は、一般的なCT再構成のステップではないですが、
ハード的に起こる幾何誤差が及ぼすアーチファクトを軽減するため、
よく使用されている技術です。
弊社は、Omni逆投影技術の高汎用性およびGPUの高速演算性を利用して、
ハード的に起こる幾何誤差を自動的に抽出するフォーカシング技術を開発し、
CT再構成画像のアーチファクトを軽減しています。
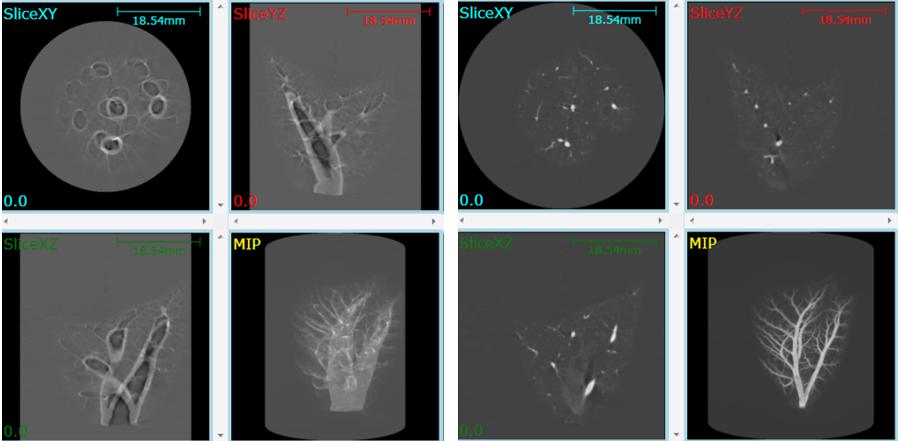
| 幾何誤差が補正ない場合のCT再構成画像 |
幾何誤差が補正した場合のCT再構成画像 |
|
フォーカシング技術は、数学的に最適化(数理計画)理論に基付き、
CT再構成画像の情報量と画質を度量する評価関数を最小化することによって実現できます。
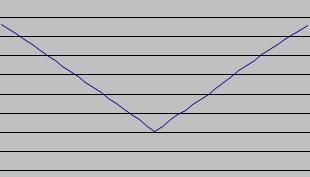
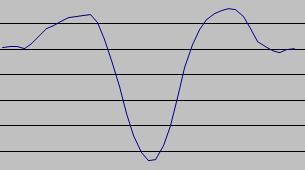
評価関数として、情報理論に基づいたエントロピー関数を使用した手法[1]もありますが、
この手法は、ノイズがある場合、最小値の唯一性がなくなり、
下の図に示したように最適化アルゴリズムの安定性が低くなります。
| エントロピーの変化グラフ(ノイズなし) |
エントロピーの変化グラフ(ノイズあり) |
|
|
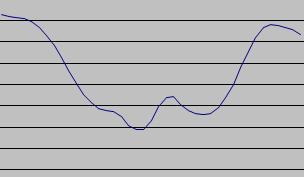
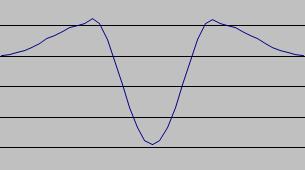
TomoShop® では、ノイズがあっても、
最適化アルゴリズムがロバストに収束できるように、
評価関数を設定して、 ハード的に起こる幾何誤差をより正確に評価し、
アーチファクトを軽減を実現しました。
| 弊社の評価関数の変化グラフ(ノイズなし) |
弊社の評価関数の変化グラフ(ノイズあり) |
|
|
[1] Y. Kyriakou, R.M. Lapp, L. Hillebrand, D. Ertel and W.A. Kalender,
Simultaneous Misalignment Correction for Approximate Circular Cone-Beam Computed Tomography
,
Phys. Med. Biol. Vol. 53, No. 22, pp. 6267-6289, 2008.
マーカーフォーカシング機能は、サンプルのある特徴部位がカメラに映る位置を複数の方向からマニュアルでチェックすることによって、
検出器、ステージおよび X 線源軌道の補正を行う機能です。
すなわり、サンプルにマーカー(球体)を付けて撮影する場合、機械のランダム誤差まで補正することができます。
この補正機能の結果は、機械誤差の再現性が高い場合、特製のマーカーサンプルを撮影し、
その機械誤差を推定し、再利用できます。
| マーカーは球体で、撮影像では円である |
機械の振動などのランダム誤差 |
|
|
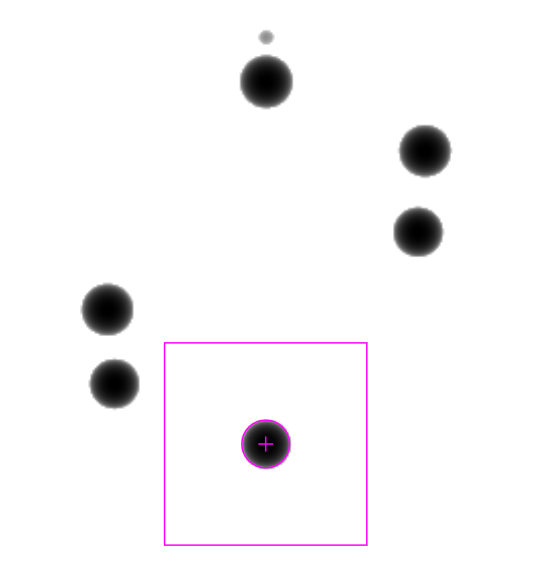
マーカーフォーカシング技術では、OpenCVを利用して円心を検出し、
各マーカーの3D位置及びそのモーション誤差を、数学的に最適化(数理計画)理論に基付いて推定します。
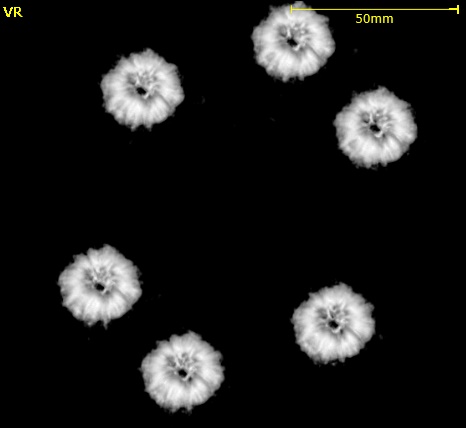
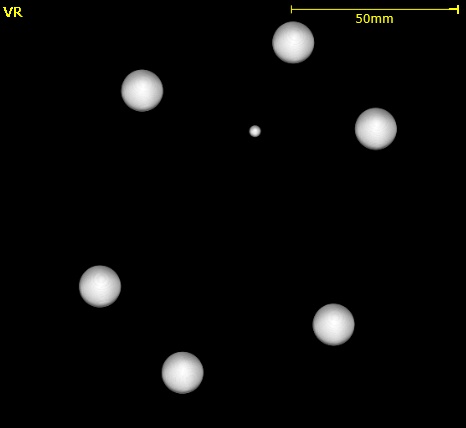
下の図では、補正なしと補正ありの再構成画像を示します。
| ランダム誤差補正なしのCT再構成画像 |
マーカーフォーカシング補正後のCT再構成画像 |
|
|